




司南技术π·2026年第1期|北斗短报文技术与应用
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南技术π·2026年第2期|卫星导航芯片核心指标详解
返回列表知识分享
作者:司南导航
发布时间:2026年04月30日
关注企业公众号:


核心导读
我们每天都在使用卫星导航芯片,却很少真正看见它。手机里的车道级导航,智能手表记录的运动轨迹,无人机在空中稳定悬停,背后都离不开一颗小小的导航芯片。它决定了设备能否快速定位、稳定锁星,在复杂环境下保持精度,也决定了定位结果到底是“差不多能用”,还是“关键时刻靠得住”。
那么,芯片性能到底该如何判断?本期「司南技术π」从测试实操出发,围绕导航芯片评测中的十大核心指标,带您了解高精度导航芯片的性能要求与测试重点。
Part 1
灵敏度芯片的“顺风耳”,弱信号环境的扛压底线
导航卫星远在两万多公里高空,信号传输到地面时已经衰减得极其微弱,灵敏度本质就是芯片拾取、锁定微弱卫星信号的核心硬实力,主要分为三个关键维度。

高架遮挡、林荫覆盖、楼宇夹缝等典型弱信号场景,对芯片卫星信号捕获、跟踪与重捕获能力提出更高要求
• 捕获灵敏度:芯片从零状态搜星,首次成功探测到卫星信号的基础能力,不同类型的芯片列有差异,高精度型约-138dBm即可满足,导航型一般可以做到优于-148 dBm。
• 跟踪灵敏度:芯片锁定卫星后持续稳定跟踪、不易失锁的能力,导航型芯片可做到-165 dBm,也是车辆穿行高架下方、树荫遮挡、城市楼宇夹缝等弱信号区域,导航依旧连续不中断、定位不偏航的核心保障。
• 重捕获灵敏度:信号被建筑、树木短暂遮挡中断后,芯片快速恢复信号跟踪、接续定位的应急复原能力。
实际测试过程中,我们使受用高精度卫星信号模拟器精准调控信号强弱。测试跟踪灵敏度时,先设置标准正常信号让芯片稳定锁星定位,再逐步衰减信号功率,直到芯片刚好出现信号失锁,精准记录这一临界数值作为判定依据;测试捕获灵敏度时,直接在预设弱信号电平下给芯片下发复位指令,核验芯片能否在规定标准时间内,顺利完成首次搜星并输出有效定位结果;重捕获与捕获类似,也是在预设弱信号电平下给芯片短暂断开射频输入再重新接入,测试其能否在规定时间内恢复定位。
Part 2
首次定位时间(TTFF)导航开机即用的核心反应速度
这项指标专门衡量芯片从上电开机,到完成数据解算、输出有效定位结果的整体响应快慢,根据芯片留存的历史数据和先验信息差异,分为三种典型启动工况。
• 冷启动:芯片无任何历史位置、时间及星历数据,需要全范围扫描搜星并完整最新卫星星历,全程耗时相对较长,行业典型标准约30秒左右。
• 温启动:芯片留存粗略位置与时间信息,仅卫星星历数据过期失效,无需盲目全量搜星,一般十几秒即可完成有效定位。
• 热启动:芯片瞬时断电重启,核心星历数据完好有效,无需重新下载解析数据,1-5秒就能瞬间恢复精准定位,使用体验无感衔接。
我们实测时会在卫星信号模拟器中固定统一测试场景,保证每一轮测试环境完全一致、数据可对比。冷启动测试前,会对待测模块长时间彻底断电,清空芯片内部所有存储数据,彻底擦除全部历史先验记忆;热启动则在芯片稳定定位后快速断电重启,计算芯片从上电启动,到首次输出有效定位报文的精确时间间隔,以此测定首次定位时间。
Part 3
定位精度
从米级日常导航到厘米级高精度作业的核心差距
这是大众用户和行业应用最关注的核心指标,业内统一采用圆概率误差(CEP)作为精准量化标准,不同定位模式对应不同应用场景,精度等级差异悬殊。
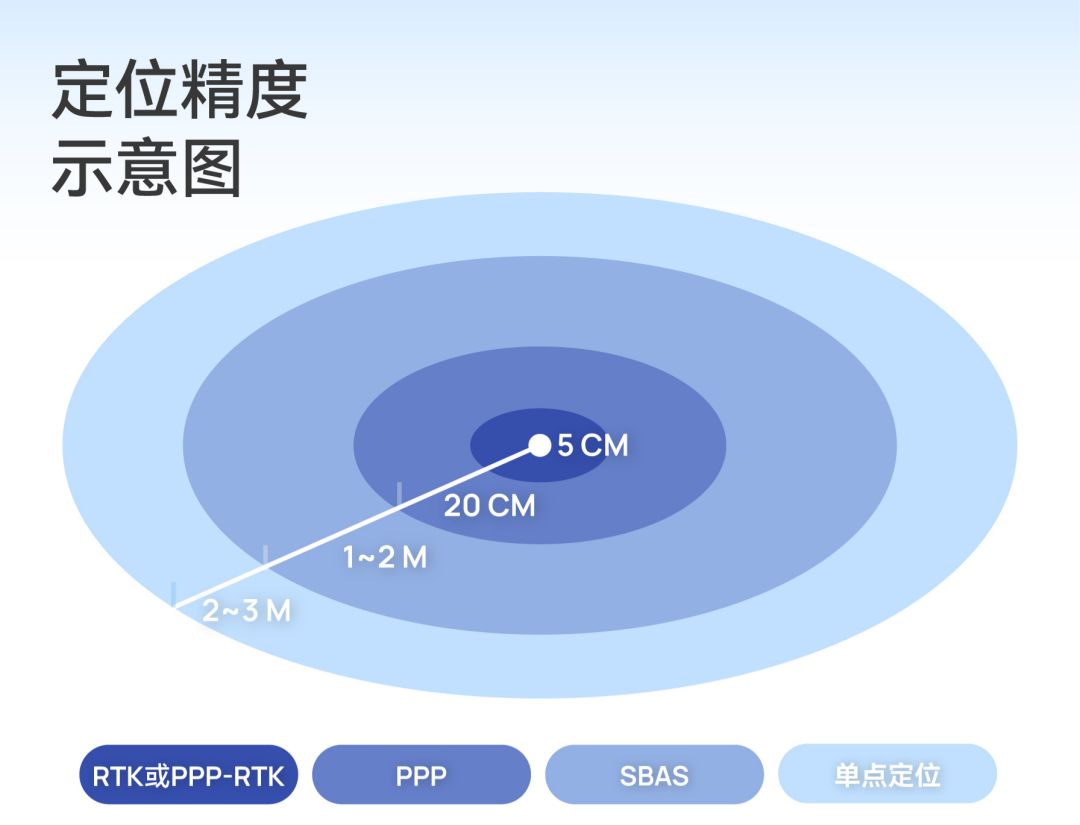
定位精度示意图
• 单点定位:普通民用芯片基础定位能力,开阔户外环境下水平定位精度2-3米,垂直高程精度4-5米,完全满足日常行车、人员定位等导航需求。
• SBAS星基增强:依托GEO卫星播发轨道、钟差和大气修正信号,可将定位精度提升至1-2米,是航空、海事等关键领域的安全保障。
• PPP精密单点定位:依靠全球精密卫星轨道与钟差改正数据,单台设备无需基站配合就能实现20cm至厘米级定位,适配远洋航海、荒漠勘探等无地面基站覆盖的高精度作业场景。
• RTK实时动态定位:依托基准站差分数据快速修正定位误差,实现整周模糊度固定,稳定实现厘米级实时定位,是无人机测绘、农机自动驾驶、高精度设备巡检的核心技术。
• PPP-RTK定位:兼顾PPP广域无基站覆盖和RTK快速收敛、高精度的双重优势,无需密集布设基准站,既能大范围作业,又能快速收敛达成稳定厘米级定位。这是自动驾驶和下一代精准农业的理想技术形态。
定位精度一般采用CEP95这一指标。评估静态精度时,我们将芯片接收天线安置固定点位,连续24小时不间断采集定位数据,计算水平与高程95%置信度下的误差;动态精度则搭载高精度组合导航设备作为真值参考,开展实车跑车路测,也可使用信号模拟器完成评估。
Part 4
动态性能
高机动工况下不丢星、定位不漂移的抗造能力
针对赛车竞速、无人机机动、航天运载等高速运动、大过载作业场景,芯片必须具备过硬动态性能,核心考核最大支持速度、抗冲击加速度、加加速度三大参数。主流芯片普遍支持500m/s最大测速、4g抗加速度,面对车辆急刹、大角度机动转弯等常规工况,全程稳定锁星不丢信号、定位轨迹不漂移。

高速机动场景下,芯片需保持稳定锁星与连续定位,确保轨迹不丢失、不漂移
一般通过卫星信号模拟器,自主编辑大过载转弯、高速加减速、连续机动变向等各类极端高动态仿真轨迹,模拟各类严苛真实作业工况。采集需要的定位日志等,分析芯片在整个机动过程中信号跟踪、定位与测速精度情况,检查卫星有无失锁,延迟和噪声是否合格。
Part 5
载波伪距精度
所有厘米级高精度定位的核心基石
RTK、PPP、PPP-RTK所有高精度定位应用,核心命脉都在于载波相位观测量。载波精度以相位残差的均方根(RMS)为衡量标准,直接决定整周模糊度固定速度和定位噪声水平,是高精度导航芯片与标准精度芯片的核心分水岭。
业内统一采用零基线测试方案,将两台同型号待测芯片设备通过功分器接入同一天线,确保两台设备信号接收路径完全一致。通过站间和星间差分算法处理后,可消除卫星钟差、星历误差、大气延迟、接收机钟差等各类误差,最终测算得到的伪距残差和载波相位残差,该残差纯粹反映芯片自身观测噪声,依据此计算伪距和载波精度指标。
Part 6
数据更新率与低延迟
实时闭环控制的关键保障
对于无人机飞行控制、自动驾驶车载定位等专业应用场景,常规的1hz更新率的定位输出显然无法满足其使用需求,需适配10Hz至100Hz高更新率;与此同时,ms级低延迟至关重要。更新率和延迟直接决定设备控制响应的精准度与安全性。

高更新率、低延迟,是衡量芯片动态响应与闭环控制能力的关键指标
实测依托精密时间同步系统和硬件在环仿真设备开展精准测试,一方面比对PPS脉冲与芯片定位报文输出时间戳,测定其精确延迟;另一方面在模拟器下仿真各类高动态场景,让芯片在不同更新率下,直观对比各场景下轨迹顺滑度、贴合度及延迟差异,评估其延迟控制水平;亦可直接采用用户的集成设备进行测试,实时观察在用户集成设备的控制状态。
Part 7
功耗表现
穿戴与低功耗终端的续航生命线
对于智能手表、便携定位追踪器、野外无人监测终端等产品,功耗直接决定设备续航时长。重点需要观测芯片瞬时功耗、连续跟踪工作功耗、高温工况下连续工作功耗;部分导航型芯片可通过间歇休眠节能模式,可将平均功耗压至毫瓦级,需要关注其休眠唤醒状态的平均功耗。
测试使用精密电源,以高采样率持续监测芯片冷启动、信号捕获、连续跟踪、休眠唤醒等全工作阶段的瞬态峰值电流与长期平均电流,精准记录各工况下功耗数据。
Part 8
抗干扰与防欺骗
导航应用不可逾越的安全底线

复杂电磁环境下,抗干扰、防欺骗能力决定定位结果是否稳定可信
卫星导航信号本身强度微弱,极易受外界电磁干扰和人为信号欺骗。一款合格的导航芯片,必须具备完善的窄带、宽带干扰抑制能力和防欺骗能力,避免定位信息被恶意拉偏篡改,守住各类民用、特种场景的定位安全底线。
抗干扰测试在标准导航仿真场景中,叠加单音、扫频、宽带高斯等各类干扰信号,逐步提升干扰强度,测试芯片在不同干信比工况下的跟踪灵敏度与定位精度稳定性,标定芯片抗干扰极限能力;抗欺骗测试通过独立欺骗信号源生成虚假导航信号或者转发式欺骗信号,缓慢拉偏定位位置,核验芯片能否精准识别异常欺骗信号。
Part 9
测速精度
运动载体速度解算的准度指标
测速精度代表芯片基于多普勒观测值解算的速度与真实运动速度的偏差,直接影响行车测速、无人机调速、轨道交通管控等闭环应用。普通导航型芯片动态测速误差常规控制在0.1~0.5m/s,高精度芯片可达厘米甚至毫米级测速水准,确保运动过程速度平稳准确。
测试分静态稳速和动态跑车仿真两种,静态统计固定状态下测速波动误差,动态在以模拟器真值作为基准,或者采用高精度组合导航系统为真值进行评估。
Part 10
授时精度
通导一体化的时间同步基准
授时精度是芯片1PPS秒脉冲及内部时间与卫星UTC标准时间的同步偏差,是通信基站、电力调度、金融时序、物联网协同的核心基础。普通消费级芯片为几十纳秒级授时,工业及高精度授时芯片可达十纳秒级,保障多设备系统时间精准对齐、时序不乱、数据同步可靠。
实测以高精度时间同步测试仪对接标准时钟源,长期监测芯片1PPS输出相位差,统计授时抖动和长期漂移,考核芯片在连续跟踪和工况切换下的授时稳定性能。
Part 11
结语
没有全能芯片,只有适配场景的最优芯片
卫星导航芯片的性能评判,并不是单项参数越高越好。低功耗、更新率、灵敏度、观测量精度、延迟、算力负荷等指标之间,往往存在相互影响与取舍。真正有价值的测试,不是只看某一项数据是否突出,而是看芯片能否在具体应用场景中保持稳定、可靠、适配的综合表现。
随着智能交通、低空经济、智慧城市、数字施工、无人系统等应用不断发展,高精度定位正在进入更多行业场景。司南导航自研QC7820、TC1720两款GNSS芯片,基于自主可控的芯片架构,支持全系统卫星导航信号的捕获、跟踪与解算,可面向不同行业需求,提供稳定可靠的高精度定位能力。
相关新闻