




司南技术π·第8期 | 挖机引导系统架构及关键技术分享
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南技术π·第9期 | SLAM技术优势与应用
返回列表知识分享
作者:司南导航
发布时间:2025年08月21日
关注企业公众号:


核心导读
重塑空间感知边界的关键技术
在城市峡谷、林地、隧道、地下空间等传统GNSS信号盲区,仍存在广泛的测绘、巡检和导航需求。而SLAM(Simultaneous Localization and Mapping,即同步定位与建图)技术的出现,为解决这些问题提供了突破口。
SLAM能够在不依赖外部定位系统的前提下,通过设备自带的激光雷达、IMU、相机等传感器完成空间建图与自身定位。正因如此,它成为“空间数字化”领域的一项关键能力,在测量、导航、机器人等行业持续扩展其边界。
本期「司南技术π」将从SLAM的技术原理讲起,探讨其优势与局限,并深入解析其为何必须与GNSS融合,最终实现“全局锚定+局部重建”的双重定位能力。同时也将简要介绍司南导航在融合式SLAM系统方面的工程实践与落地探索。
Part 1
SLAM技术概述
空间感知与重建的技术基石
SLAM的本质,是让设备在没有地图的环境中,通过感知周围并不断更新地图的方式,实时判断“我在哪”。设备边走边绘制环境地图,边绘边估计自身在地图中的位置,实现了定位与建图的同步进行。
1.1 SLAM的核心技术要点
要实现上述能力,SLAM系统通常依赖以下六个关键环节:
1. 传感器数据获取:通过激光雷达、摄像头、惯性测量单元(IMU)等多源传感器采集环境信息;
2. 特征提取与跟踪:从传感器数据中提取特征点,并跟踪这些特征点来估计运动轨迹;
3. 数据关联与地图构建:利用数据关联算法将不同时刻的特征点进行匹配,逐步完成地图构建;
4. 位置估计与优化:结合传感器与地图数据,通过滤波或优化算法估计设备当前位置并修正地图;
5. 循环检测与闭环校正:当设备回到既有路径时,通过闭环检测来校正累积误差,提高地图一致性;
6. 增量式更新:不断接收新的传感器数据,实时进行位置与地图的更新,实现持续建图与定位。

SLAM技术使扫地机器人能自主构建房间地图
其中,激光3D SLAM方案因其精度高、稳定性强,成为当前工程领域中的主流路径,具备以下突出优势:
• 高精度点云构建:激光雷达提供厘米级测距,生成稠密三维点云,利于环境重建与路径规划;
• 强环境适应性:可在隧道、林地、夜间等复杂环境稳定运行,不依赖光照或纹理;
• 无需外部基站:在GNSS不可用场所仍可独立完成定位与建图,灵活度高;
• 生态体系成熟:算法迭代完善,硬件成本持续下降,推动应用场景不断拓展。

3D SLAM用多线激光雷达获取环境的三维数据
1.2 SLAM的固有局限与融合突破
尽管优势明显,但SLAM依然存在不足:其定位基于相对运动推算,易产生累计漂移误差;所构建的“局部坐标系”难以直接对应全球坐标系,限制了成果的地理适配能力。
因此,在常规激光SLAM测量系统(激光雷达+IMU+影像传感器)的基础上,引入GNSS定位模块成为必然选择。通过增加GNSS天线,可将SLAM的相对位置与CGCS2000、WGS84等全球坐标体系对齐,既强化了定位精度与稳定性,又让激光SLAM测量系统拓展到更多对地理配准有强需求的应用场景。这一思路正是“GNSS+SLAM融合”的出发点。
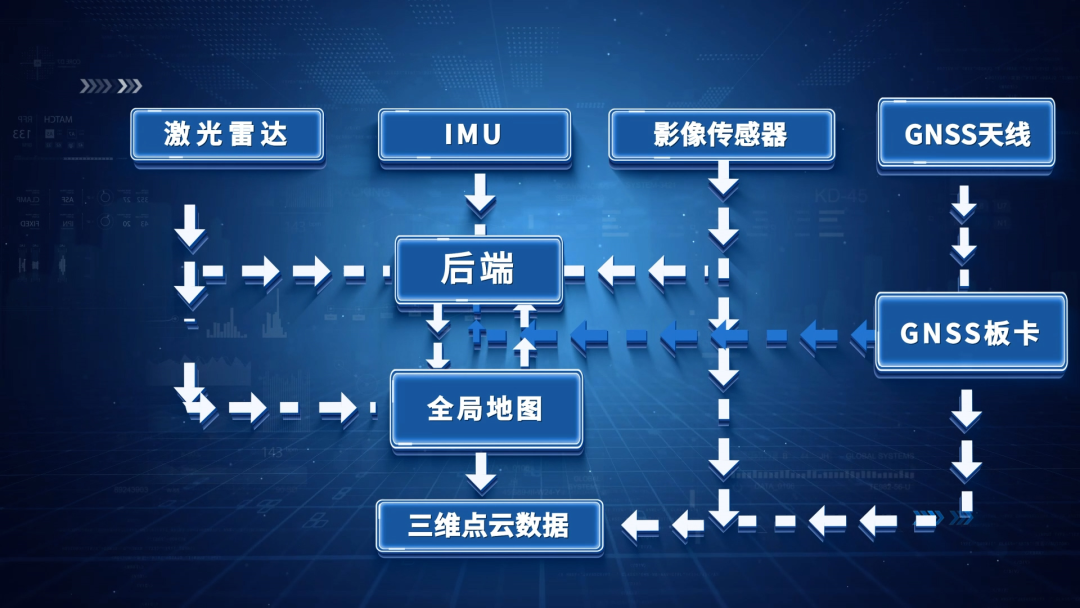
“GNSS+SLAM”融合示意图
Part 2
融合探索
GNSS为SLAM补上“全局感知”的拼图
2.1 GNSS在SLAM系统中的角色:
SLAM定位是“局部准确、全局漂移”,GNSS定位则是“全局参考、局部易失”。二者天然互补,融合的价值正体现在关键场景中:
• 漂移约束器:GNSS的绝对位置输出可作为SLAM图优化的约束项,显著降低累计误差;
• 全局锚定器:使得SLAM构建的地图具备真实世界的地理坐标意义;
• 定位冗余源:在SLAM特征不足或算法失效时提供位置兜底;
• 任务适配支点:如GIS联动、施工导航、应急调度等对地理配准有强需求的场景。
2.2 融合的技术价值:1+1 > 2
1. 补强稳定性:融合系统在不同环境中智能切换主定位源,提升导航连续性;;
2. 提升成果精度:点云数据具备可复用的坐标价值,可直接导入建模、测绘或设计平台;
3. 扩展应用边界:无缝适用于户外林地到地下隧道的全域空间,支撑多任务协同;
4. 实现设备通用性:为多种载体(背包、车载、无人机等)提供统一定位输出。
融合不只是技术拼接,更是系统工程的协同升级。从“近场眼睛”走向“全局感知器”,SLAM在GNSS的配合下,正成长为一体化空间理解系统的核心组件。

“GNSS+SLAM融合”能获得更准确的定位信息
Part 3
典型场景实践
融合式SLAM系统的落地图谱
SLAM+GNSS融合系统已经在以下典型领域中发挥关键作用:
• 矿区巡检与隧道测量:在封闭或半封闭环境中进行三维空间建图与变形监测;
• 森林资源调查与巡检:突破树冠遮挡,实现林下结构还原与生态数据采集;
• 地下管廊与地铁站测绘:为城市“地下城”构建可视化数字地图;
• 应急救援与抢险指挥:在无地图、无通信的灾后环境中实现快速建图与定位引导。
这些场景的共同需求是:高精度定位+强环境适应+可地理配准的三维成果输出,正是融合系统发挥价值的最佳舞台。
Part 4
司南融合式SLAM系统
LS600从实验室走向工程现场
作为高精度GNSS导航系统领域的深耕者,司南导航正积极推动GNSS与SLAM的融合落地,推出融合式SLAM系统解决方案。

司南导航LS600系列融合系统
以LS600系列融合系统为例,该方案集成了双摄系统、激光雷达、GNSS高精度模块、多频天线,以及网络模块,具备以下特点:
• 模块化快拆设计:采用高效快拆结构,安装流程大幅简化,支持快速部署与即拿即用,显著提升外业操作效率。
• 极强的环境适应性:可高效完成建筑立面测绘、室内及地下空间扫描、地形测量、土方测算、粮库容量估算和矿山体积计算等多样化任务;
• 高精度点云数据:所生成的点云数据在厚度与精细度方面处于同类设备领先水平,数据质量可靠;
• 专用点云处理软件:界面逻辑清晰、操作简化,新用户也能快速上手;
• 实时可视化采集:可在采集过程中通过终端实时查看点云及轨迹,增强外业工作的可控性与便捷性;
• RTK 融合免回环扫描:融合RTK定位技术,在固定解状态下实时校准SLAM位姿,实现无回环扫描,尤其适用于大场景作业,有效减少人力与时间成本。
Part 5
结语
SLAM是一项兼具感知与推理能力的前沿技术,而GNSS为它提供了稳定、全局的导航锚点。二者的融合,不是简单的技术叠加,而是一次“局部与全局、相对与绝对”的协同升级。当下,空间智能的边界不在于设备能走多远,而在于是否能持续稳定地“知道自己在哪儿”——SLAM与GNSS融合,正是通向这一能力的关键路径。
相关新闻