




司南技术π·第7期 | GNSS抗干扰全景实测 —— QC7820芯片对比解析
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南技术π·第8期 | 挖机引导系统架构及关键技术分享
返回列表知识分享
作者:司南导航
发布时间:2025年08月14日
关注企业公众号:


核心导读
数字施工主要是为工程机械提供精准的作业引导和服务定位,以提高工程效率、作业安全。随着基建行业的不断发展,数字智能的持续提升,为了提升挖掘机工作装置控制智能化程度,特此分析挖掘机工作装置的几何结构关系。依据北东地(前右下)导航坐标系,约定建立挖掘机工作装置坐标系模型。
本期「司南技术π」聚焦于挖机引导系统架构及关键技术,通过建立模型,分析计算油缸位移长度到 D-H 参数的变换关系,确定运动链关节变化,最后绘制工作的作业图,让挖掘机的动臂、斗杆、伸缩臂、铲斗精准运作。

司南导航挖掘机引导系统现场作业
Part 1
硬件结构

挖掘机引导系统硬件结构
Part 2
系统架构原理
2.1工作装置的结构及坐标系的建立
挖掘机工作装置结构,由动臂、斗杆、伸缩臂、 铲斗组成,步履式挖掘机工装置是典型的机械操作臂, 可以运用机械运动学理论方法进行建模和分析。
这里将工作装置结构进行简化处理,并依据 D-H 约束方法建相应坐标系。
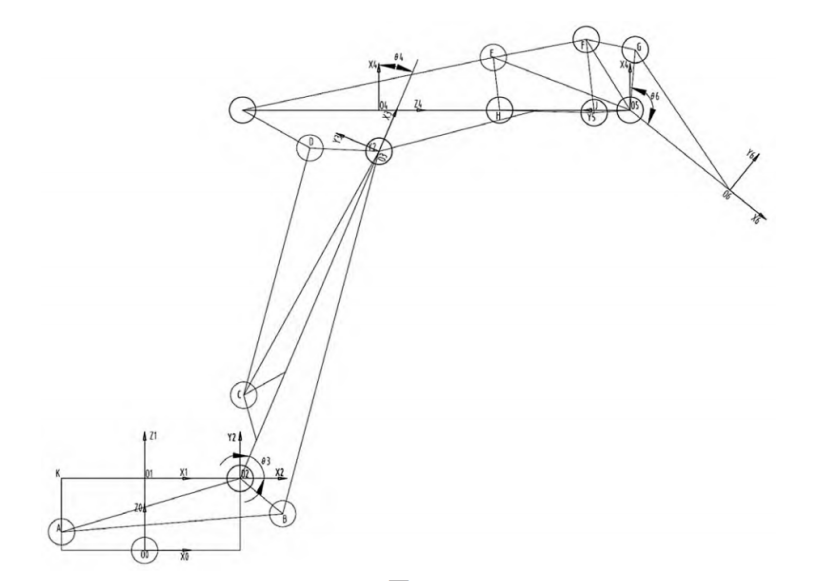
工作装置的坐标系
坐标系建立过程中,为了方便计算坐标系变换关系, 直接对坐标系O做平运动。在 D-H 方法建模中四个参数分别定义:
ai — 连杆长度,是沿 zi-1 和轴 zi 之间沿轴线 xi 测得的距离;
αi — 连杆扭曲,垂直于 xi 的平面内测得的轴线 zi-1 和 zi 之间的夹角,正向 zi-1 旋转到 zi ;
di — 连杆偏置 ,为从原点 Oi-1 到轴线沿轴 xi 与 Zi-1 交点之间的距离,沿轴线 Zi-1 测得;
θi — 关节角度, 垂直于 Zi-1 的平面内测得的从 xi-1 到 xi 的角度。
2.2 关节变量参数范围计算
回转运动范围的计算
为使建模计算方便,从坐标系O1到坐标系O0变换时,变换关系如下
A1= Rotz TransV
挖掘机采用全回转,旋转变量 θ1 取值范围
![]()
动臂运动范围计算
从工作装置结构图,可得动臂关节角计算公式为:

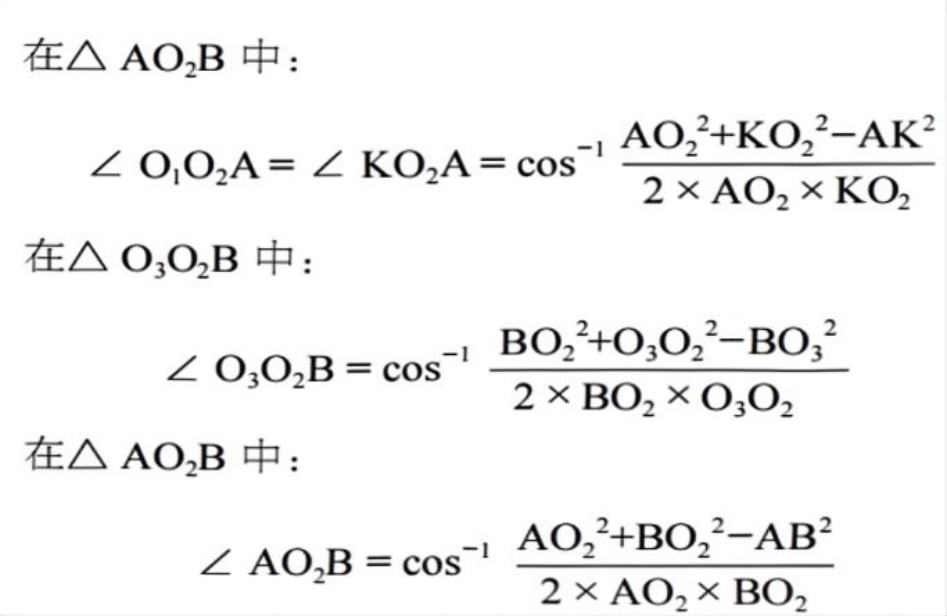
求得取值范围:

斗杆回转运动范围的计算
从工作装置结构图,动臂关节角计算公式为:
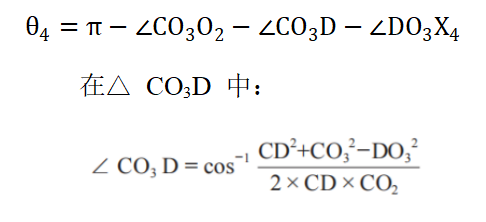
求得取值范围:
![]()
伸缩臂关节运动范围计算
伸缩臂关节是移动关节,关节变量的运动范围与伸缩
臂油缸的行程范围相同,所以0+1.9068 ≤ d5 ≤ 1.500+1.9068, 单位 m。
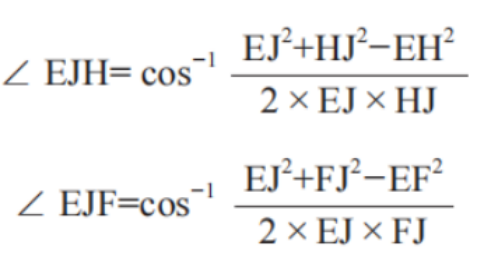
铲斗关节运动范围计算
从工作装置结构图,动臂关节角计算公式为:
![]()
在△ EHJ 和△ EFJ 中:
EF 为铲斗油缸安装距离:500 ≤ AB ≤ 500+825
在△ HO5J 中:
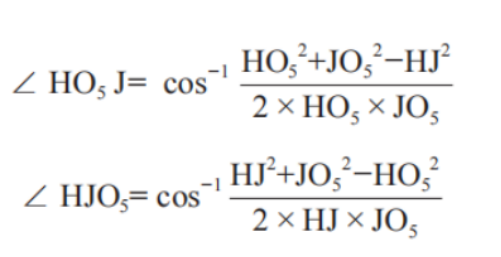
图中可以看出:
∠FJO5 = ∠HJO5-∠EJH-∠EJ
在△ FJO5 中
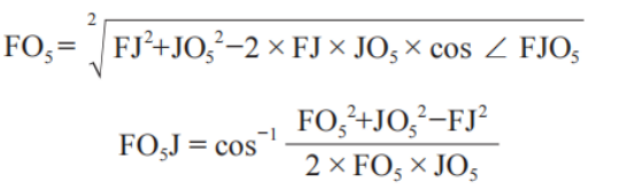
在△ FO5G 中:
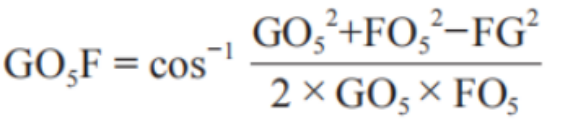
在△ GO5O6 中:
![]()
最后求得取值范围:
![]()
Part 3
结语
正运动学通过机械关节变量的取值确定工作装置末端的位置和姿态,是机械控制与作业引导的重要基础。为实现数字施工的智能化与精确化,需要对挖掘机工作装置进行运动学分析,并建立基于右前下坐标系的参数化模型,准确刻画各部件的几何与运动关系。
该模型不仅为挖机引导系统的姿态解算、动作协调和轨迹规划提供支撑,也为施工过程的实时控制、效率提升和安全保障奠定基础。未来,结合多传感器融合与自适应控制策略,可进一步推动工程机械作业的自动化与智能化升级,实现更高效、更安全的施工目标。
相关新闻