




无人机飞控系统原理与组成
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
什么是无人机飞控系统?
返回列表知识分享
作者:
发布时间:2021年09月26日
关注企业公众号:

无人机飞控系统是无人机完成起飞、空中飞行、执行任务和返程等整个飞行过程的核心系统,能够自主采集导航传感器数据,自主完成数据融合、系统逻辑处理、飞行控制解算以及在线故障容错处理,从而控制无人机自主或半自主飞行,相当于无人机的大脑。
固定翼无人机飞行的控制通常包括方向、副翼、升降、油门、襟翼等控制舵面,通过舵机改变飞机的翼面,产生相应的扭矩,控制飞机转弯、爬升、俯冲、横滚等动作。不过随着智能化的发展,无人机已经涌现出四轴、六轴、单轴、矢量控制等多种形式。
传统直升机形式的无人机通过控制直升机的倾斜盘、油门、尾舵等,控制飞机转弯、爬升、俯冲、横滚等动作。多轴形式的无人机一般通过控制各轴桨叶的转速来控制无人机的姿态,以实现转弯、爬升、俯冲、横滚等动作。
飞控的作用就是通过飞控板上的陀螺仪对无人机进行控制,具体来说,要对四轴飞行状态进行快速调整,如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢、升力变小,自然就不再向左倾斜。如果没有飞控系统,四轴飞行器就会因为安装、外界干扰、零件之间的不一致等原因形成飞行力量不平衡,后果就是左右、上下地胡乱翻滚,根本无法飞行。
飞控系统实时采集各传感器测量的飞行状态数据、接收无线电测控终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理,输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行信道发送回地面测控站。

按照功能划分,该飞控系统的硬件包括:主控制模块、信号调理及接口模块、数据采集模块以及舵机驱动模块等。各个功能模块组合在一起,构成飞行控制系统的核心,而主控制模块是飞控系统核心,它与信号调理模块、接口模块和舵机驱动模块相组合,在只需要修改软件和简单改动外围电路的基础上可以满足一系列小型无人机的飞行控制和飞行管理功能要求,从而实现一次开发,多型号使用,降低系统开发成本的目的。
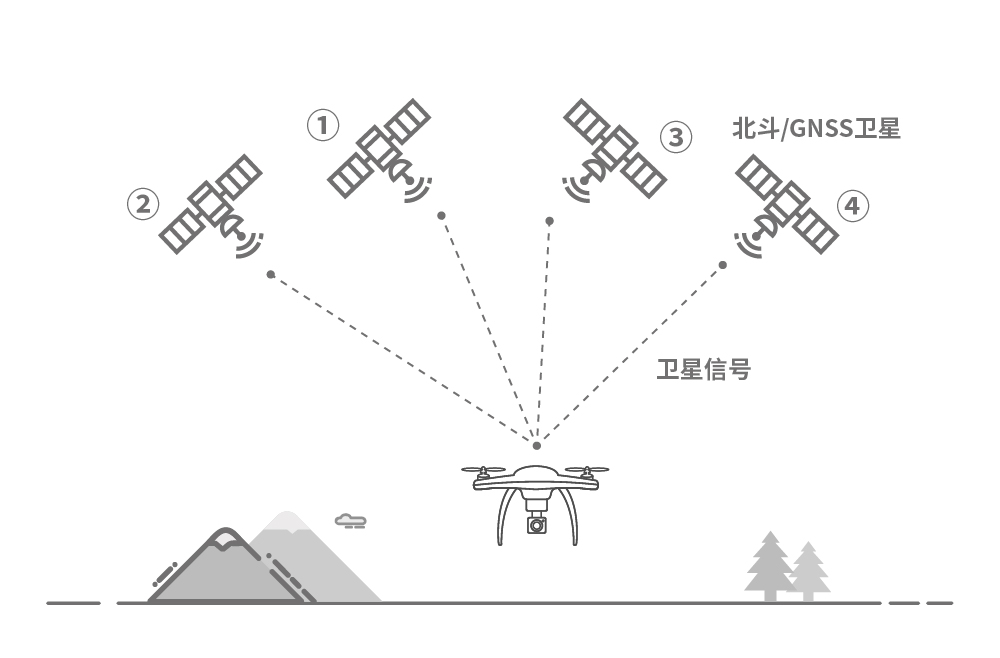
在飞控系统中,GNSS模块作为最重要的传感器、能为无人机提供实时位置、航行姿态、速度、精准时间等信息。飞控系统结合其他传感器信息进行综合分析、处理,并调整无人机引擎的转速及方向,从而控制无人机按照规划路线精确飞行,按照预设起飞降落点进行精准起飞、下降。
相关新闻