




GPS发射的载波信号有哪几类?
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
GPS定位的基本原理
返回列表知识分享
作者:
发布时间:2021年04月15日
关注企业公众号:

司南导航:GPS定位的基本原理是根据高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方交会的方法,确定待测点的位置。如下图所示,假设t时刻在地面待测点上安置GPS接收机,可以测定GPS信号到达接收机的时间△t,再加上接收机所接收到的卫星星历等其它数据可以确定以下四个方程式:
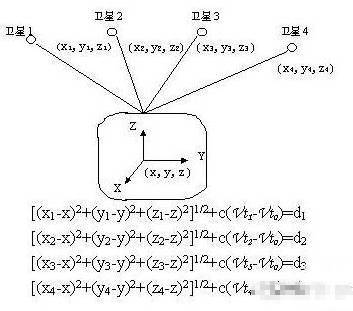
上述四个方程式中待测点坐标x、 y、 z 和Vto为未知参数,其中di=c△ti (i=1、2、3、4)。
di (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4到接收机之间的距离。
△ti (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的信号到达接收机所经历的时间。
c为GPS信号的传播速度(即光速)。
四个方程式中各个参数意义如下:
x、y、z 为待测点坐标的空间直角坐标。
xi 、yi 、zi (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4在t时刻的空间直角坐标,
可由卫星导航电文求得。
Vt i (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的卫星钟的钟差,由卫星星历提供。
Vto为接收机的钟差。
由以上四个方程即可解算出待测点的坐标x、y、z 和接收机的钟差Vto 。
目前GPS系统提供的定位精度是优于10米,而为得到更高的定位精度,我们通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。差分GPS分为两大类:伪距差分和载波相位差分。
1. 伪距差分原理
这是应用最广的一种差分。在基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,提高定位精度。这种差分,能得到米级定位精度,如沿海广泛使用的“信标差分”。
2.载波相位差分原理
载波相位差分技术又称RTK(Real Time Kinematic)技术,是实时处理两个测站载波相位观测量的差分方法。即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。载波相位差分可使定位精度达到厘米级。大量应用于动态需要高精度位置的领域。
相关新闻