




中国的北斗卫星导航系统的原理、应用及前景
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
技术干货 | GNSS+惯导融合算法如何实现高精度倾斜测量?
返回列表知识分享
作者:
发布时间:2021年11月23日
关注企业公众号:

集成GNSS高精度模块的RTK接收机,在测量测绘领域得到了广泛的应用,如电力勘测、土方测量、市政测量、地下管线探测、地形图测绘、施工放样等等。随着RTK接收机应用场景的日益复杂,对RTK性能的要求也更加严苛。高精度模块是RTK接收机的关键元器件,提升模块的性能则成了测量高效、便捷、安全的核心所在。
下文将不具备惯导元器件的高精度模块构成的RTK接收机称为传统RTK接收机。一般情况下,传统RTK接收机在测量时,要求使用者必须将对中杆的水准气泡居中。水准气泡居中保证了对中杆与测量点所在处的铅垂线重合,模型简化计算下可认为在当地地理坐标系(n系)下,GNSS天线相位中心与测量点的平面坐标一致,高程坐标仅差别对中杆的长度,如图1所示:
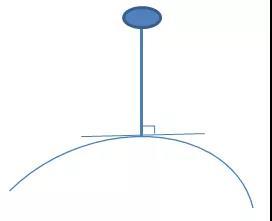
(传统的RTK接收机测量示意)
传统RTK接收机虽然软件上实现简单,但是增加了使用者的负担,并不高效便捷, 特别是在墙角、树荫、楼宇间等测量场景下根本无法作业。
在此背景下,带有惯性测量单元的GNSS/INS高精度模块应运而生。在集成GNSS/INS模块后,RTK接收机可实现倾斜测量功能,此类RTK接收机也叫做惯导RTK接收机。
惯导RTK接收机倾斜测量软件实现如下:将GNSS天线相位中心与对中杆杆尖连线看作一个矢量(矢量L),在当地地理坐标系(n系)下,当确定了这个矢量朝向哪个方向倾斜,即方位角(Heading),以及倾斜了多少,即倾角(Tilt),就可以通过投影变换确定测量点的坐标。如此以来,实现倾斜测量的关键就是求取这两个角度。
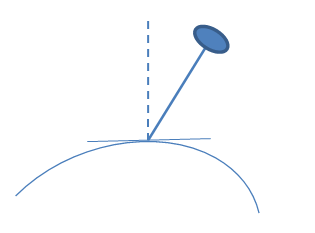
(惯导RTK倾斜测量示意)
在设计GNSS/INS高精度模块时,将惯性器件(IMU)加速度计Z敏感轴与矢量L平行。
我们设定载体坐标系(b系)与3轴加速度计的敏感轴向平行,原点位于敏感轴的交点,构成右手坐标系。那么,无论模块随着接收机如何运动,在b系下矢量L是一个常值矢量。利用这一确定性关系,前述两个角度求取的问题就可以通过确定b系与n系的旋转关系,即姿态角来解决,其由GNSS/INS组合导航系统实时解算获取。
进一步的,

其中,
 为航向角,
为航向角, 为横滚角,
为横滚角, 为俯仰角。
为俯仰角。
此外,决定倾斜测量精度的关键因素在于初始航向角的获取以及航向角精度的保持,司南导航设计的GNSS/INS高精度模块就充分考虑到了这一点。