北斗GNSS产品在驾考/驾培系统中的应用:科目三GNSS应用方案介绍
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
北斗GNSS产品在驾考/驾培系统中的应用:科目二GNSS应用方案介绍
返回列表应用案例
作者:
发布时间:2021年08月23日
关注企业公众号:

对于驾校考试系统的科目二,要求测试整个车辆的位置(前后左右移动情况),如果使用GNSS卫星定位系统至少需要两台设备,既要测出车的方位角度又要测出具体位置。
1. RTK成品推荐M600姿态定位接收机
司南公司专为驾校系统研发设计出M600 GNSS姿态定位接收机,它采用中国的北斗二代卫星定位系统和美国GPS双星四频GNSS板卡,可以实现在树下、遮挡较严重和高动态情况下能实现快速高精度定位和测向。通过M600 GNSS姿态定位接收机,可以准确无误的判断出车辆整体运动情况,误差在厘米级定位精度。
基于M600接收机的科目二驾考系统示意图如下:
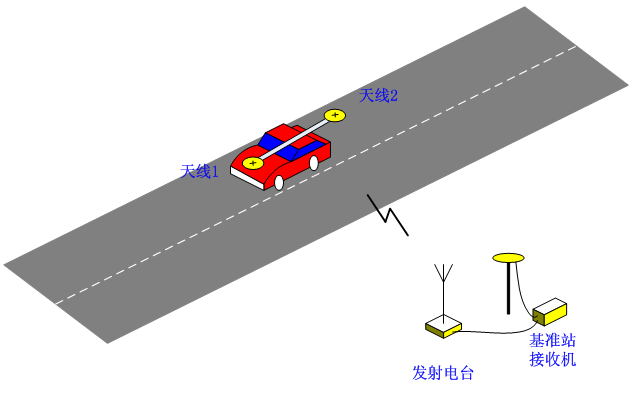
系统组成示意图
主要特点:
1)采用北斗与GPS双核双星四频GNSS模块,可单北斗或单GPS定位,也可联合RTK定位
2)单套设备可实现高精度RTK定位坐标、方位角和俯仰角或横滚角测量;
3)支持PJK平面坐标输出,无需第三方软件做投影转换;
4)高动态数据输出,数据更新率支持1Hz、2Hz、5Hz、10Hz;
5)可根据客户需求自定义数据输出格式;
6)450-470MHz超高频无线电台适用基准站和流动站作业,确保现场工作的电台信号覆盖范围以及数据安全性,通讯协议支持透明传输、TT450S;
7)内置2000伏光电隔离,对接收机有效进行过流过压保护,预防雷击;
8)内置二极管电源保护功能,可防电源正负极接反;
9)预留支持以太网、GSM/GPRS通讯;
10)时间同步支持1PPS实时输出;
11)支持自动差分,差分格式支持RTCM2.X、RTCM3.X以及CMR;
12)两个电源接口,两个串口,满足更多需求的使用;
13)内部储存为100M,可设置自动记录原始数据;
14)高度灵活的分体式接收机、天线设计,可以应用于各种姿态测量系统;
15)姿态测量功能精度优越、性能稳定、功能全面、易于操作,能提供静态或动态平台精确的实时航向、俯仰和横滚姿态角,可以运用在多种运动载体上,如船舶、装卸车辆、港口机械、飞机、雷达等,是海上、空中和地面等姿态测定应用最理想的选择。
2. 工作原理
M600 GNSS姿态定位接收机内置两块GNSS板卡,其中一块根据基准站发过来的差分数据进行RTK定位并输出定位坐标,此板卡同时把原始数据发给另一块板卡,另一板卡根据两个板卡的原始数据解算出两个天线位置的方位角和俯仰角或者横滚角,从而输出角度信息。
测姿的原理也是通过差分来实现,就是用两台接收机安置在基线的两端并同步观测相同的卫星,以确定基线两端在地球坐标系中的相对位置或基线向量。它之所以能提高精度,就在于两者的相关性,即通过差分技术来抵消公共误差部分。
差分 GNSS的原理如下图原理所示。在已知位置上设置一个参考站,其由一个 GNSS差分接收机和一个差分发射机组成。参考接收机接收卫星信号,监测 GNSS系统的误差,并按规定的时间间隔把修正信息发给另一个接收机,另一个接收机用修正信号校正自己的测量或位置解。
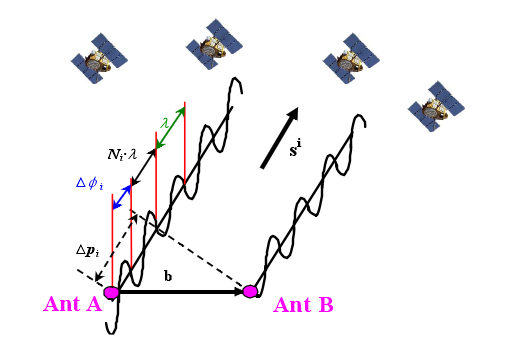
GNSS载波差分原理图
这是参考接收机是固定的情况,而实际应用时更多是都在移动,在这种情况下,参考接收机的位置也是未知的,参考接收机发送给用户的不是差分改正数,而应是全部的伪距或相位,用户接收机得到的也不是改正后的精度更高位置,而是精度较高的相对位置角度。
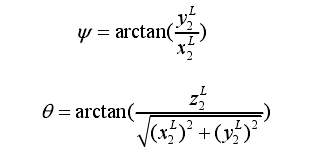
两个 GPS 天线组成一条基线可以确定载体的两个姿态角,两天线沿载体主轴方向配置,此时可以确定载体的偏航角和俯仰角。一般的,两 GPS 天线在安装好后,相对位置不发生变化,所以天线在载体坐标系中的坐标位置是确定的。
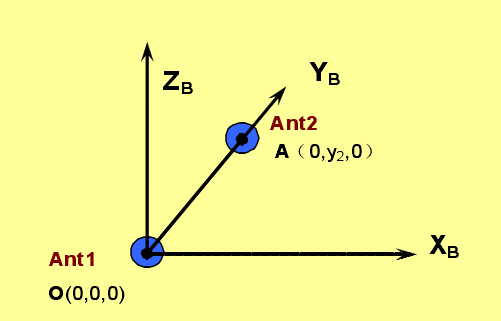
单基线天线配置
通过求解载波相位整周模糊度,两天线在地心地固坐标系中的相对位置可以精确的求得,根据地心地固坐标系到当地水平坐标系的转换关系,即可将基线矢量转换到当地水平坐标系下,那么基线的两维姿态角就可以确定了。