




司南导航:基于北斗RTK的碾压监控系统(基础篇)
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南导航:基于北斗RTK的碾压监控系统(系统篇)
返回列表应用案例
作者:
发布时间:2021年10月27日
关注企业公众号:

3、系统组成
基于北斗RTK的碾压监控系统由软件系统与硬件设备两部份构成,软件系统又可以分为平台调度软件和车载终端软件。
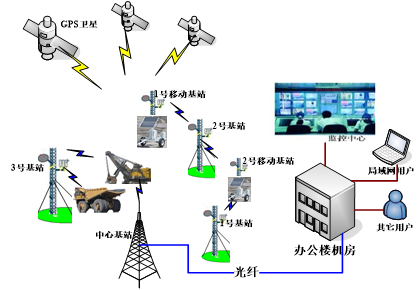
图3-1 系统组成
3.1平台调度软件
安装在监控中心的平台调度软件可以及时的获取压路机的工作状态以及当前工作面的状况,对工程的进度和工程的质量进行宏观的调控。
平台调度软件主要可以实现的功能包括:
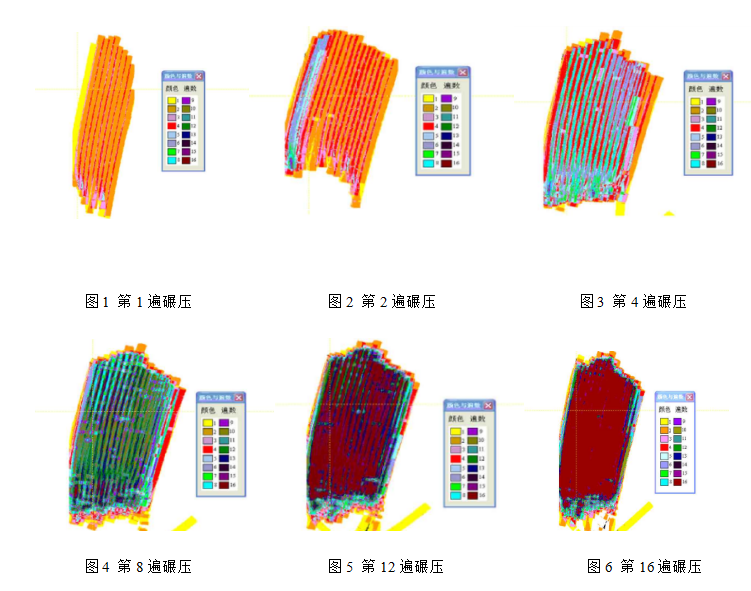
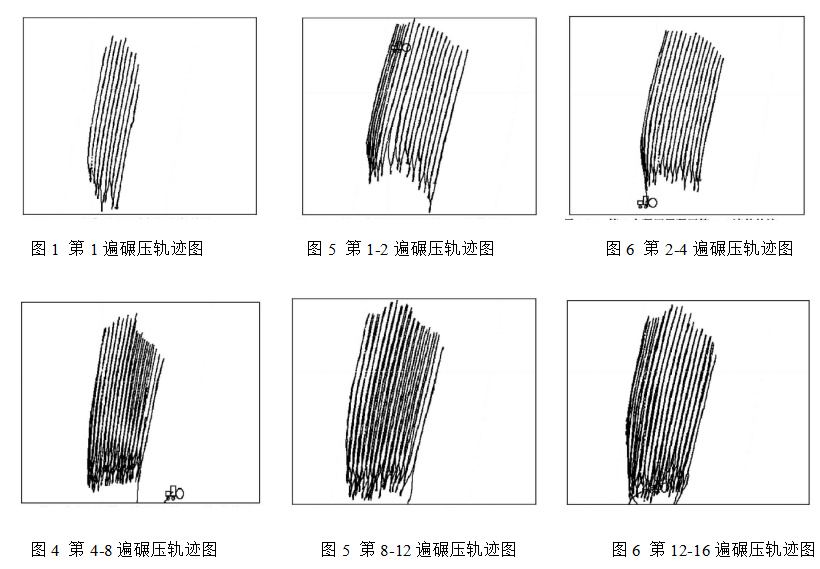
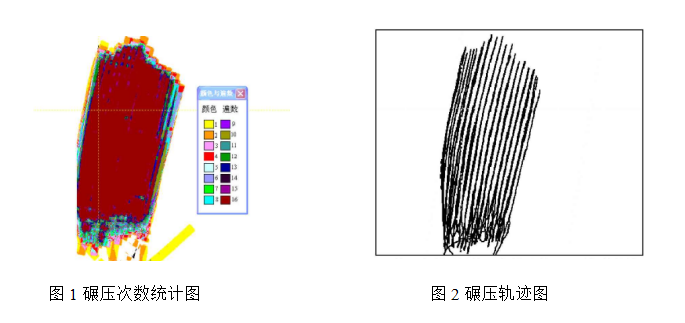
1、可以通过图像分析技术实时分析碾压遍数。主要可以进行总碾压遍数的统计、任意时间段范围内的碾压遍数统计。采用实时分析,可对任一部位的碾压遍数进行查询,具有分析精度高,速度快,计算准确等特点。
该功能实现的原理为将RTK动态测量的数据导入监控中心的PC机上,A 点为参考站,M点为流动站,求出A点的坐标后,固定 A 点的坐标不改变,解算M点连续位置,得到M点每秒一次的三维坐标及时间信息,据此,可以描述出碾压轨迹图,碾压仓面的三维地形模型以及碾压遍数图。
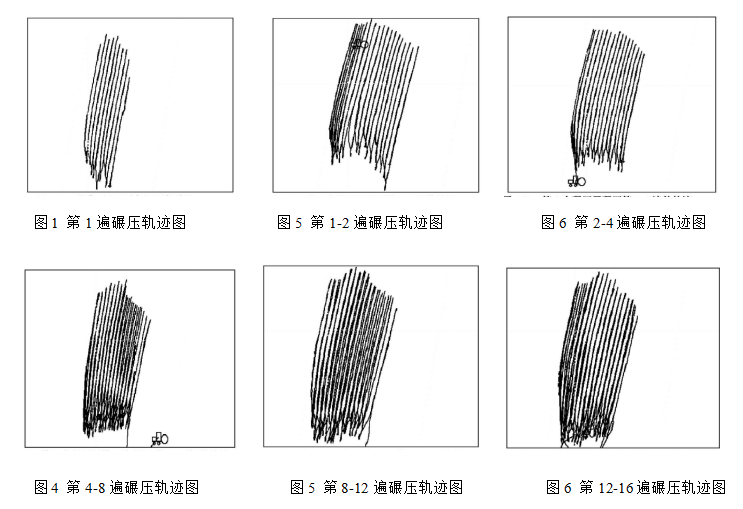
2、该平台调度软件可以对压路机的运行轨迹进行实时的记录,防止工作面产生过压和漏压的现象。
在平台调度软件中,得到移动站M 点的连续轨迹点坐标后导入软件即可得到碾压轨迹图,同时,亦可将其坐标导入 EXCEL 表中进行处理。
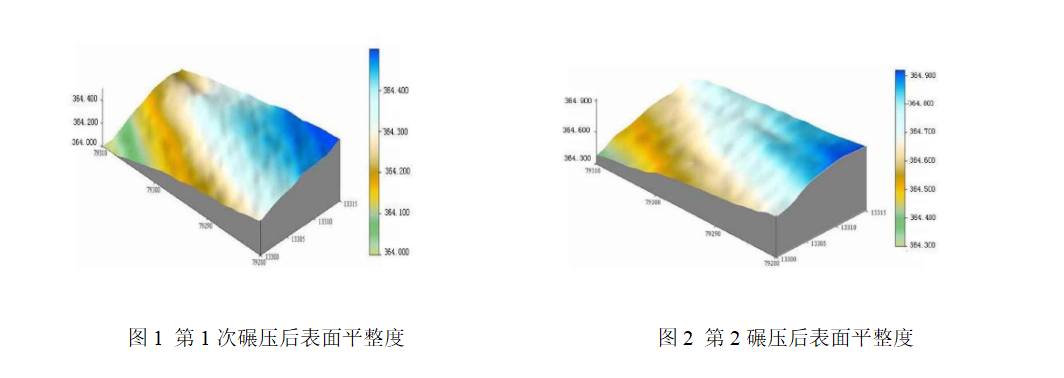
3、平台调度软件可以对碾压后的工作面平整度进行计算,判断当前工作面是否达到设计要求。
路面平整度指的是路表面纵向的凹凸量的偏差值,是路面评价及路面施工验收中的一个重要指标,主要反映的是路面纵断面剖面曲线的平整性。当路面纵断面剖面曲线相对平滑时,则表示路面相对平整,或平整度相对好,反之则表示平整度相对差。好的路面则要求路面平整度也要好。路面平整度是评定路面质量的主要技术指标之一,它关系到行车的安全,舒适以及路面所受冲击力的大小和使用寿命。
4、平台调度软件除了可以实时监控碾压的实际情况外,对所有的监控数据都进行了备份和存储,事后可以对碾压过程进行回放,作为施工效果的评价和后分析评价的依据。
5、平台调度软件可以与车载终端软件实现双向通信,共享信息的同时指挥和管理机械进行施工。
6、生成分析报告,可根据每个工作面的实际工作情况生成分析报告。
3.2车载终端软件
安装在压路机工作平板上的车载终端软件是专为操作机械的施工人员所定制的,该车载终端软件主要用于使机械操作人员了解当前施工机械的位置、速度信息,以及及时的获取当前工作面的状态和接收监控中心发来的施工指令。
车载终端软件所具有的功能主要包括:
1、引导司机进行施工,通过碾压轨迹记录,指导压路机进行碾压施工。该功能实现原理与监控中心软件一致。
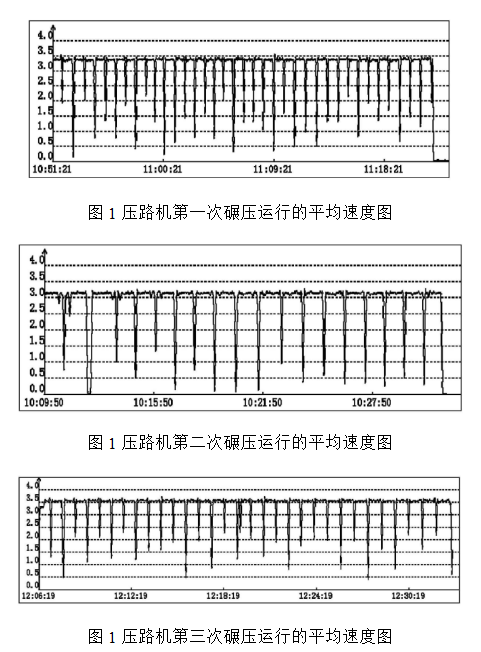
2、机械操作人员可以通过车载终端软件获取当前压路机的行进速度,实现对压路机速度的控制,进一步控制工作面的压实质量。
该功能的计算原理是通过车载终端软件处理得到的M点坐标及其时间信息,可以求出 M 点每个时刻的速度。设相临两个时刻 t1 和 t2 的 M 点点位坐标为 P1 ( x1 , y1 , h1 )和 P2 ( x2 , y2 , h2 ),则距离
P1P22 = ( x1- x2 )2 + ( y1-y2)2 + (h1-h2)2
因为数据采集时间间隔为 1 秒,即
$t=t2-t1=1
所以,碾压速度
v=P1P2/$t
由于这种方式计算的速度突变比较厉害,与实际情况并不相符合,所以,在这里采用了一种平滑方式,如将前6秒的速度取平均作为其即时速度。可以时间作为横坐标轴,速度作为纵轴,绘制数据的碾压速度图。
3、以图像的形式记录碾压机的实际碾压次数和碾压轨迹图。避免过压和欠压情况的发生。
4、记录当前工作面的高程以及当前工作面的平整度,方便机械操作人员查看自己的工作是否满足质量要求。
5、接收平台调度软件发送的指令,根据指令进行施工。
3.3硬件设备
构成基于北斗RTK的碾压监控系统的硬件部分主要包括构成基准站与移动站的司南导航自主研发的M300GNSS接收机全套设备以及工业平板电脑等设施。
3.3.1基准站
基准站是为了提高系统的监控精度而设置的,在一般情况下,为便于供电,管理和维护,基准站应建立在监控中心,为确保监控精度,基准站与施工区的距离应控制在5~6km范围内。
本系统基准站是由M300GNSS接收机+UDL电台构成,司南导航M300 GNSS接收机采用自主知识产权BDS+GPS双星五频GNSS模块,为GNSS产业革命性产品,其GPS+BDS跟踪能力,增多跟踪卫星数量,增加多余观测量提高解算精度,特别是北斗卫星导航系统组网卫星的不断增多,可用性与可靠性不断加强;北斗卫星导航定位系统的独有功能,5颗地球同步卫星,可大大降低接收机跟踪卫星的PDOP,提高解算精度。其单点定位精度小于1.5米,RTK定位精度可达到1.5cm,完全可以满足日常施工要求。

图3-11 M300 GNSS接收机
UDL电台使移动GPS接收机和基准站GPS接收机数据,通过相同频率进行数据通讯传输,实现系统实时动态的精准定位。

图3-12 UDL电台
3.3.2移动站以及平板电脑
安装在碾压机械上的流动站,主要由系统集成机箱,M300GNSS接收机以及测量天线和无线通讯天线组成。移动站的主要作用在于进行移动观测,其观测项目主要是碾压机械的运行轨迹、运行速度、碾压遍数和压实度,并将有效的观测结果连续、实时地反馈到平板电脑和监控中心。
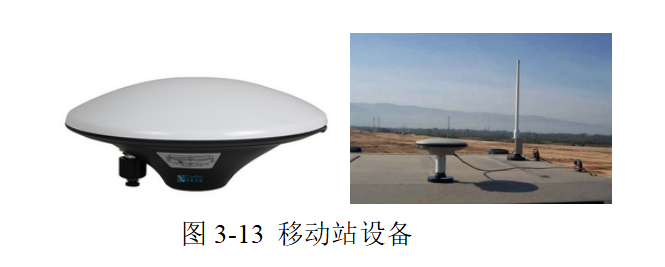
图3-13 移动站设备
4、测试及结论
为了验证基于北斗RTK的碾压监控系统在运行中的稳定性、可靠性、准确性,确保其能够按系统设计的预期目的可靠运行、我们在实际项目中对该系统进行了现场验证。
通过该项目的现场认证,采集到了比较实用可靠的实验数据,通过对数据大量统计分析得出如下结论:
1、系统软硬件是可靠的,在多次不同环境测试过程中没有出现任何问题。
2、本系统采用了RTK定位技术,其平面定位精度为1.5cm,足以满足日常施工的精度要求。
3、可以完整记录压路机的运行轨迹、以及统计碾压遍数,有效的避免了过压和欠压现象的产生。
4、可以及时的获取当前工作面的高程和机械的速度信息,引导机械操作人员施工。
5、对于施工过程中的平整度控制,由于没有具体要求,没有现成的检验标准,只取得了视觉上的平整。
6、可以较好的实现车载终端与监控中心的双向通信,及时的解决施工过程中遇到的问题。
通过本次试验,基于北斗RTK的碾压控制系统相比传统的施工方法有着明显的优势。系统应用稳定性强,提高了施工进度,大大节省传统人力物力。而且无需测量人员和辅助施工人员,缩减人力成本和管理成本。以图形、数值等多种方式显示实际施工偏差,引导操作手精确施工,缩短工期。通过及时有效的信息传递,有效的避免了二次施工现象,避免了资金浪费,使企业以及承包商的利益最大化。