

GNSS自动化变形监测技术是啥
-
返回主菜单产品
-
返回主菜单解决方案
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南导航CDC软件:VRS原理
返回列表知识分享
作者:
发布时间:2021年11月01日
关注企业公众号:

司南导航www.sinognss.com:1. VRS原理简介
1.1 CORS、网络RTK、VRS概念
1) CORS:连续运行基准站网(Continuously Operating Reference Stations ,CORS),一个或若干个固定的、连续运行的GNSS参考站,利用计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GNSS观测值(载波相位,伪距)、各种改正数、状态信息以及其他有关GNSS服务项目的系统。
2) 网络RTK:在一个区域内建立多个(一般为三个或三个以上)的GNSS参考站,对该区域构成网状覆盖,并以这些基准站中的一个或多个为基准计算和发播GNSS改正信息,从而对该地区内的GNSS用户进行实时改正的定位方式称为GNSS网络RTK,又称为多基准站RTK。
3) VRS :虚拟参考站技术(Virtual Reference Station ,VRS),首先在一定区域内架设一定数量(最少三个)的基准站,基站接收卫星信号,然后将信息传送至信息处理中心,移动站先将接收机的位置信息发送到数据处理中心,数据处理中心会根据移动站的位置,选择附近几个基准站信息,“虚拟”出一个参考站,然后,将虚拟出的参考站改正数据播发给移动站,这个虚拟参考站的位置通常是在移动站周围5千米范围内,但是实际情况中,一般是几米之内,通过这项技术所获得的数据误差就减小了很多。
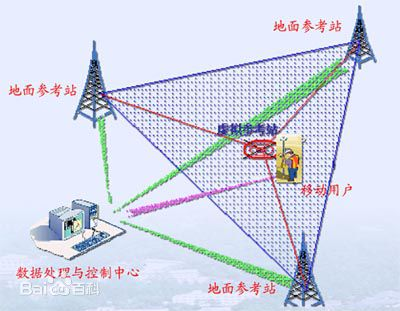
图 1 VRS工作原理示意图
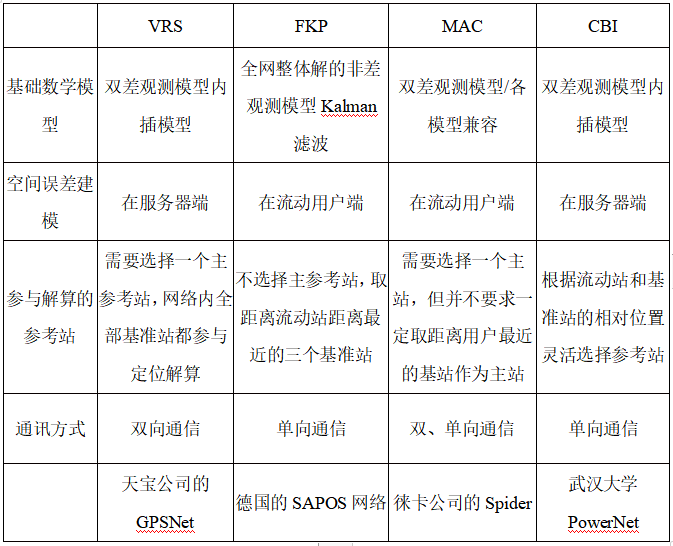
1.2 几种网络RTK技术比较分析
1.3 VRS基本原理
1.4 VRS关键技术
VRS软件的关键技术有:
Ø 一是基准站长基线的模糊度固定。如何实现长基线模糊度的快速、准确固定,是影响系统初始化时间、可用性的关键因素。
Ø 二是区域空间大气误差的精确建模。大气误差的建模精度直接影响用户的定位精度。
围绕这两个核心因素,需要解决的相关技术要点有:
Ø 数据实时传输,不同格式数据的编码、解码;
Ø 数据质量控制,周跳、钟跳、多路径等相关误差的处理;
Ø 大容量用户接入时的并发处理;
1) 基线模糊度固定
a) 宽巷模糊度

b) 消电离层组合

c) L1模糊度和天顶对流层延迟RZTD(短基线可忽略对流层影响,不进行估计,长基线需要估计ZTD)

2) 基线大气误差延迟信息计算
a) 双差电离层延迟计算


b) 双差对流层延迟计算

3) 虚拟参考站处对流层、电离层延迟线性内插
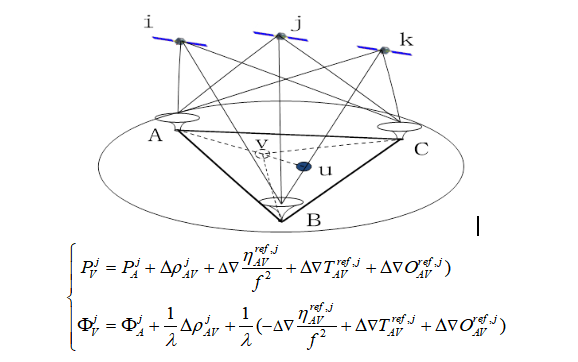
4) 虚拟参考站综合改正数生成
a) 综合改正数:

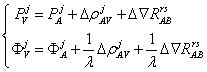
b) 非差观测值:
1.文章部分文字与图片来源网络,如有问题请及时联系我们。
2.涉及转载的所有文章、图片、音频文件等资料,版权归版权所有人所有。
3.本文章内容如无意中侵犯了媒体或个人的知识产权,请联系我们立即删除。